(7)过程控制系统虚拟仿真实验
发布日期:2016-09-20 浏览次数:8953
|
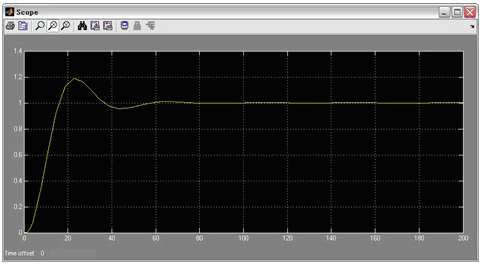
通过过程控制系统虚拟仿真实验三条响应曲线可以看出:P和PID控制器校正后系统响应速度基本相同(调节时间近似相等),但是P控制器校正产生较大的稳态误差,而PI控制器却能消除静差,而且超调亮较小。PID控制器校正后系统的响应速度最快,但超调量最大。
实验内容 ①稳定边界法(临界比例度法)整定参数; ②衰减曲线法(阻尼振荡法)整定参数; ③现场经验凑试法整定参数。
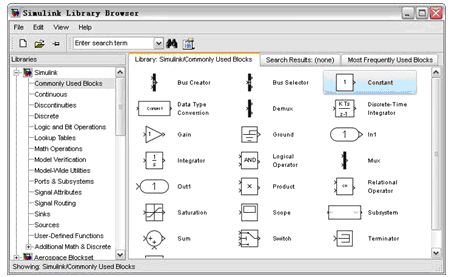
实验流程 步骤1:通过不同模块的搭建,将系统接成单回路反馈系统; 步骤2:利用稳定边界法(临界比例度法)整定参数; 步骤3:按“先P后I最后D”的操作程序,将控制器整定参数调整到计算值上,如图14所示; 步骤4:绘出稳定边界法参数整定的响应曲线,如图15所示; 步骤5:利用衰减曲线法、经验试凑法进行参数整定。
实验功能和效果 ①通过信号处理虚拟仿真实验,学生更进一步的理解了在过程控制系统中,不同比例、积分、微分调节对于反馈系统的作用。 ②仿真的图片结果,能够让学生实现对课程的巩固复习与深入了解,从而达到理论联系实际,从中取得进步。 |